
Điều khiển động cơ bước 5V và module ULN2003
Điều khiển động cơ bước 5V- Giới thiệu
Bài viết nguồn xem tại: Link
Điều khiển động cơ bước 5V là bài học thứ 8 trong chuỗi bài tự học arduino. Ở bài học này, chúng ta sẽ cùng làm quen với loại động cơ bước đơn giản 28BYJ-48 và module ULN2003.
Loại động cơ bước được sử dụng trong bài học này là loại động cơ bước 4 pha (2 pha được chia đôi ở mỗi pha ngay tại vị trí giữa) (gồm 5 dây). Một bước động cơ xoay 5.625 độ, để quay hết một vòng là 64 bước

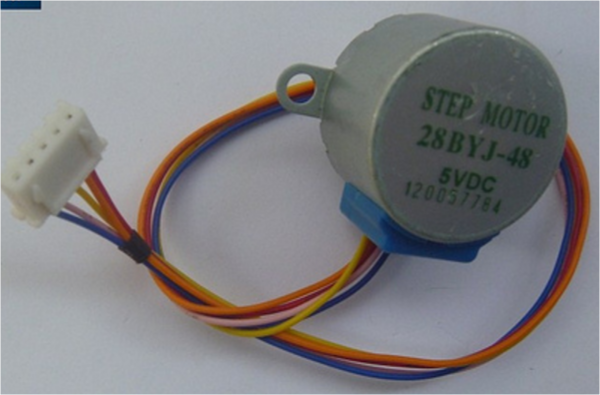
Thông số kỹ thuật
Điện thế: 5V
Số pha: 4
Tỉ lệ bánh răng: *64
Một bước tương đương 5.625 độ
Tần số: 100Hz
Điện trở trong 50 Ω±7%(25℃)
Linh kiện chuẩn bị
Hướng dẫn chi tiết
Để điều khiển động cơ bước 5V, ở video hướng dẫn sau đây chúng ta sẽ sử dụng thư viện Stepper.h được tích hợp sẵn trong arduino IDE để điều khiển. Các bạn chú ý theo dõi các bước thực hiện nhé
Code mẫu arduino
Hướng dẫn chi tiết





